
当研究室について
なぜ“電動モビリティシステム”の研究なのか?
人類はエネルギーを自由に使うことで,便利で豊かな暮らしを実現してきました。しかし,地球上のエネルギーには限りがあります。このような課題の一つの解決手段として,エネルギーとしての伝送・変換効率のよい電気エネルギーを広く使う方法があります。そのためには,高効率,高精度,高速な電力変換を実現するための,ハードウエアとその制御が必須です。これを実現する技術がパワーエレクトロニクスという電力を自在に制御する技術です。
一方,鉄道は古くから電気駆動が普及し,自動車,航空機は最近,電気駆動の適用が広まっています。これら“動くモノ”の電動化には,電力の供給,電気エネルギーの貯蔵,電力変換,電気・機械エネルギー変換を小型・軽量な機器で高精度・高速に実現する技術が不可欠です。これらの技術は世の中で電気エネルギーを利用する上でいずれも必須の技術です。すなわち, 電動モビリティシステムの研究を行うことは,世の中で高効率な電気エネルギーの利用を促進することにつながる,と考えます。
早稲田大学先進理工学部(同研究科)の電気・情報生命工学科(同専攻)の電動モビリティシステム研究室(近藤研究室)は近藤圭一郎教授の早稲田大学着任とともに2018年4月に開設された新しい研究室です。
近藤研究室では,主として,
- 動くモノに手軽にかつ高効率に電力を送るワイヤレス給電技術
- 動くモノのエネルギーを有効活用するための電力制御技術と蓄電装置・燃料電池応用技術
- 高性能な電気・機械エネルギー変換のためのモータドライブ技術とモータに関する研究
を主たる研究のフィールドとしています。また,研究の特徴として,企業などと共同研究を通じて,これらの実用的な研究を行っています。
1モータドライブシステムとモータに関する研究
「誘導電動機(IM)」は交流電動機の代名詞として広く産業用などに用いられています。その制御も含め,すでに「成熟した技術」とみなされています。
しかし,インバータを含めた駆動システムとして統合的に設計することで,性能を最大限に向上させる研究,誘導電動機を安価かつ高性能に制御するための速度センサレスベクトル制御系の今日的視点から設計法やチューニング法に関する研究,そして電源から負荷まで総合的にとらえた制御手法の研究など,誘導電動機単体の制御にとどまらず,「電気駆動システム」として捉えると,さらなる性能向上の余地が残されています。
近藤研究室ではこれらの視点と,今後も社会基盤として必須の誘導電動機制御技術伝承の両方の視点から,関連する研究に取り組んでいます。
図1は鉄道車両駆動用誘導電動機における空転再粘着制御(レール上で車輪がスリップしたときにこれを収める制御)での速度センサ有無の比較を示したものです。速度センサレスベクトル制御は産業界も含めて広く用いられていますが,いずれも速度が一定の場合を想定した設計がなされており,図1のような速度急変を想定した研究が求められています。
永久磁石同期電動機は電気自動車の駆動用としてすでにその地位を確立し,また,次世代の電動航空機の駆動用電動機としても期待されています。永久磁石同期電動機のさらなる小型軽量・高効率化のために高速回転が重要な技術となります。そのためには,インバータ出力電圧の限界を超えた弱め界磁領域での高性能なトルク制御が重要です。近藤研究室ではこれらの研究にも取り組んでいます。
図2は,インバータの出力電圧を向上すべく,ハイブリッド電気自動車のバッテリ電圧と永久磁石同期電動機の電流を協調的に制御できるような制御系設計により,高速なトルク制御を行う方法の実験結果です。
上記の他,永久磁石同期電動機にとどまらず,高価な永久磁石を用いない新しいタイプの巻線形同期電動機の研究も行っています。
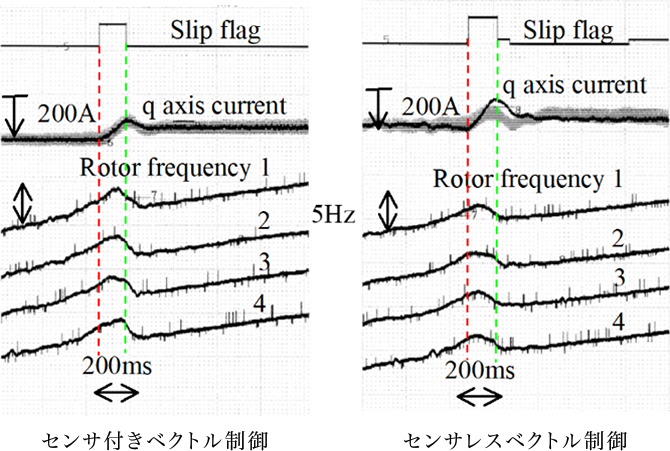
図1:空転時の速度センサレスベクトル制御性能の劣化の様子
センサレスベクトル制御では,ロータ周波数が変動(空転)した場合のq軸電流(トルクにほぼ比例)の変動がセンサ付きに比べて大きい。
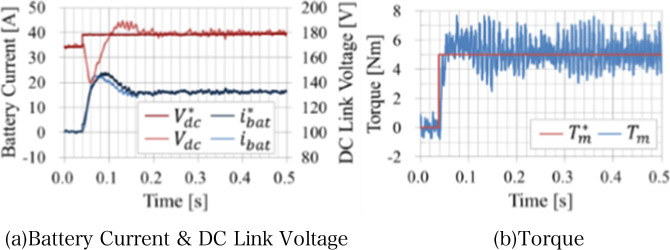
図2:ハイブリッド電気自動車を想定した電池出力と永久磁石同期電動機の協調制御
電池の出力電圧を制御する昇圧チョッパとの協調制御により永久磁石同期電動機のトルクは10ms程度で目標値に追従している。
2蓄電素子・燃料電池の応用と地上・車上電力制御に関する研究
電動モビリティシステムは,車上もしくは電力供給システムも含めて一つの電力利用ネットワークを形成します。このネットワーク内のパワーフロー制御を適切に行うことで,電気エネルギーの消費削減や,構成機器の性能向上による電気エネルギー利用範囲の拡大を目指しています。
高性能二次電池や電気二重層コンデンサなど蓄電素子,あるいは燃料電池を用いて,鉄道車両や自動車の省エネルギー化やピーク電力カットを実現する技術の研究を行っています。
図3は蓄電素子をインバータに組み込むことで,直流電源電圧のみの場合より,電動機出力を向上させることで,鉄道車両駆動エネルギーの低減を図る不均等3レベルインバータの主回路システムを提案し,その制御法の研究を行っています。
また,今後適用が期待されている航空機動力の電動化においては,駆動システムの出力密度向上に加え,高価で重量な蓄電装置の搭載量低減が求められます。このためにも図4に示すような図4に示すようなピーク電力カットのための制御技術などが重要になります。
蓄電装置を用いる以外でも,限られた電気ネットワークでの電力制御技術として,直流電気鉄道の回生電力制御や蓄電装置を用いた回生エネルギーの有効利用は,種々の電力ネットワーク制御への応用が期待されます。
これら研究テーマは,様々な鉄道事業者や電機メーカーと共同で研究を進めており,時には実際の鉄道車両を用いた実験を行うこともあります。
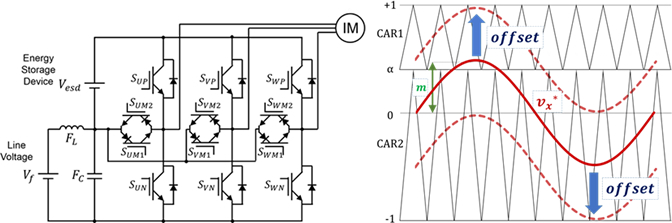
図3:不均等3レベルインバータと特有のPWM制御
交流電圧の制御と直流側の電力配分の両立を図る技術を基盤として,駆動車両の運動エネルギーを含めたエネルギーマネジメントを行います。
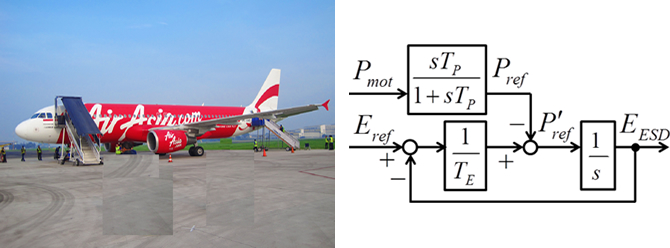
図4:現在の航空機と将来の電動化時に重要なエネルギーマネジメント技術
鉄道車両を対象にして培われた蓄電装置とエネルギー源のパワーフローを適切に制御してエネルギーマネジメントを行う手法は将来の電動航空機実現にも寄与が期待されます。
3ワイヤレス給電技術
ワイヤレス給電は非接触で電力伝送が可能な事から,電気自動車をはじめとし,電動モビリティシステムへの給電方式として多くの利点を有しています。
しかし,原理的に高周波での電力伝送が必要となるため,コイルにおける無効電力の低減や電力変換回路の高効率化が課題となります。特に,鉄道車両,バスなど100kW以上の電力供給においてはこれらの課題解決が必須になります。
また,小容量用途ではコイルと電力変換回路の統合設計による小型軽量化が重要になります。当研究室ではこれまでに図5に示すようなシステム全体の無効電力の最小化コイル設計法や,大容量の定置給電時の電力変換システムの構成と制御法の確立などを行っています。
現在では,図5に示すような大容量双方向給電のための電力変換回路の制御法と小容量の非接触給電システムの小型軽量化のための統合設計法の研究などを行っています。
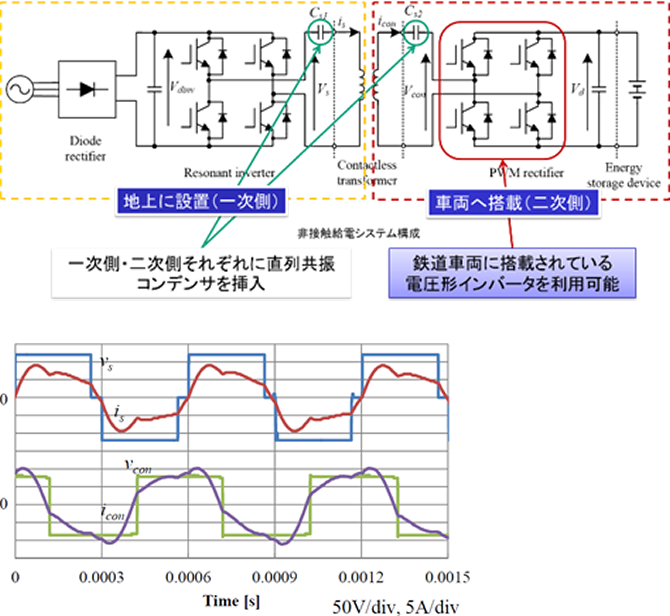
図5:双方向給電システムのミニモデル実験波形
双方向給電では,地上側の電圧情報を用いることなく,車上のPWM整流回路の制御で有効電力の双方向の制御を実現する研究です。